从 "肌肉" 到 "心脏":关节模组如何决定人形机器人的迭代命运
Date:2026-04-07机器人 "肌肉" 迎来爆发时刻
2025 年被业界普遍认定为人形机器人量产元年。特斯拉 Optimus、Figure 03、宇树 G1、傅利叶 GR-2 等明星产品相继落地工厂、走向实际应用场景。在这股浪潮背后,有一个关键零部件正悄然成为整个行业迭代速度最快的 "卡脖子" 与 "突破口"——关节模组。
关节模组是驱动机器人肢体完成运动的核心执行单元,它将电机、减速器、编码器、力矩传感器、驱动器等多个精密部件高度集成于一体,相当于机器人的 "肌肉与关节"。一台标准人形机器人通常配备 20-40 个关节模组,其成本占整机成本的比例高达 55% 以上,是整个零部件体系中权重最大、技术门槛最高、也最具市场想象空间的核心赛道。
当整机厂商在外形、AI 算法和整体方案上你追我赶时,谁能率先在关节模组的性能、成本与量产能力上取得突破,谁就能掌握下一代人形机器人产品迭代的主动权。
一、为什么说关节模组是 "迭代的新突破点"?
1. 成本结构决定竞争焦点
人形机器人的整机 BOM(物料清单)中,关节模组是毋庸置疑的第一大成本项。据行业数据,其成本占比超 50%,这意味着:降低关节模组成本,就等于在整机层面打开了价格下探的最大空间。
以特斯拉 Optimus 为例,其设计目标是将整机售价压缩至 2 万美元以内,而初代原型机单台关节模组成本动辄数万美元。从原型到量产,降本的核心战场就在关节模组这一环。
2. 力控能力决定应用边界
人形机器人能否真正胜任工厂拧螺丝、搬运箱体、甚至家庭服务等复杂任务,核心取决于关节模组的力控精度。
传统工业机器人以位置控制为主,精度高但交互僵硬;而面向复杂真实场景的人形机器人必须具备 "感知 - 响应 - 顺从" 的柔顺能力。关节模组内置的力矩传感器与先进驱动算法,使机器人在接触外界物体时,能精确感知力的大小与方向,实现毫牛级别的力控分辨率,这是机器人从 "工具" 走向 "伙伴" 的关键能力跃升。
3. 集成化趋势加速模块重构
早期机器人关节多为分体式设计 —— 电机归电机、减速器归减速器、传感器另外安装,占用空间大、可靠性差。新一代关节模组走向高度集成化:将所有核心元件封装进一个标准模块,体积缩小 20-30%,组装效率大幅提升,同时降低系统级故障风险。
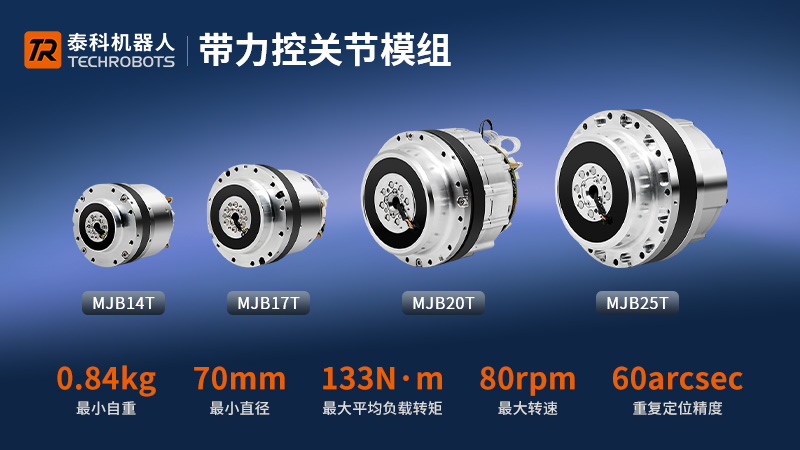
泰科机器人 MJBX 系列关节模组展现了这一趋势的典型特征:MJB14T 重量仅 0.84kg,MJB25T 的平均负载转矩达到 133N・m,功率密度的大幅提升,让关节能完成过去无法实现的动作。
二、技术路线全景:四大方向各有千秋
目前,业界主流的关节模组技术路线可分为四类,各有其适用场景与技术取舍:
1. 旋转关节模组(Rotary Actuator)
核心配置:无框力矩电机 + 谐波 / 行星减速器 + 双编码器 + 力矩传感器
这是当前量产人形机器人最主流的方案,技术成熟、控制精度高,主要用于肩、肘、腰等旋转关节。特斯拉 Optimus 上肢大量采用谐波减速关节方案。
优势:精度高、技术成熟、产业链完整
挑战:动作刚性较强,高速冲击时缺乏柔顺性
2. 直线关节模组(Linear Actuator)
核心配置:无框力矩电机 + 行星滚柱丝杠(重载)/ 滚珠丝杠(中轻载)
特斯拉 Optimus 下肢采用电动缸(Electric Cylinder)方案,大推力、结构紧凑,能模拟人腿肌肉的收缩 - 舒张机制,承载能力强。行星滚柱丝杠技术是这一路线的核心壁垒,国内很多企业正在加速国产替代。泰科机器人 HJL 系列线性关节模组全系采用行星滚柱丝杠,专为高性能人形机器人应用研发。
优势:推力大、耐冲击、结构紧凑
挑战:成本较高、加工难度大

3. 准直驱关节模组(Quasi-Direct Drive, QDD)
核心配置:高扭矩密度电机 + 低减速比传动
QDD 方案采用极低传动比(通常不超过 10:1)的行星减速器配合高扭矩密度电机的驱动方式。QDD 方案以低减速比换取高动态响应能力,关节可在毫秒级时间内完成力矩切换,特别适合下肢跳跃、行走等高动态动作。国内有些人形机器人大量应用 QDD 方案,使其能完成跑跳、翻滚等高难度动作。
优势:响应极快、动态性能突出
挑战:关节背驱性强,位置保持需持续通电
4. 串联弹性执行器(Series Elastic Actuator, SEA)与柔性仿生
核心配置:伺服电机 + 弹性元件(弹簧 / 3D 打印晶格 / 人工肌肉材料)
SEA 通过在传动链中引入弹性元件,天然实现物理层面的柔顺性与安全性。很多人形机器人的仿生手等均采用类似方案,在与人接触的交互场景中安全性更高、动作更自然流畅。
优势:交互安全、动作仿生、储能效率高
挑战:定位精度相对较低,材料寿命是长期挑战
三、市场格局:百亿赛道,国产正在逆袭
全球市场规模与爆发趋势
根据 QYResearch 最新报告,全球人形机器人执行器市场规模在 2024 年约为 1.5-1.62 亿美元,预计到 2031 年将达到 98.6-169.7 亿美元,期间年复合增长率(CAGR)高达 80%,属于典型的高速成长赛道。
中国市场与全球同步爆发。据首届中国人形机器人产业大会发布数据,2024 年中国人形机器人市场规模约为 27.6 亿元,预计 2029 年达到 750 亿元,将占到世界总量的 32.7%,位居世界第一,到 2035 年有望规模达到 3000 亿元。关节模组作为成本占比最大的核心部件,其市场体量与整机市场正向相关,增速甚至高于整机。
四、技术演进四大方向:关节模组的下一步在哪里?
1. 一体化集成:模块体积缩小,成本同步下降
将电机、减速器、驱动器、传感器全部封装进单一标准模组,体积缩减 20-30%,可将系统集成成本降低约 40%。这是未来 2-3 年最确定的技术方向。
2. 智能感知升级:从 "力感知" 到 "全感知"
新一代关节模组正集成触觉、温度、振动三合一监测功能,不仅能感知外部力,还能实现关节健康状态监测与预测性维护,使整机可靠性大幅提升。
3. 国产替代深水区:从低端到高端全面突破
谐波减速器、RV 减速器、六维力矩传感器 —— 这三个曾长期被日本和欧美厂商把持的核心零件,正随着国内企业的技术突破,逐步实现真正意义上的国产替代。高端市场份额争夺将在 2025-2027 年进入关键窗口期。
五、产业影响:关节模组突破将重塑整个人形机器人格局
关节模组的技术突破,其影响不局限于零部件层面,而将向上传导至整个人形机器人产业链:
• 应用场景扩展:更高力控精度和柔顺性,使人形机器人能够胜任精密装配、老人看护、手术辅助等此前无法涉足的高价值场景。
• 竞争格局重塑:掌握高性能关节模组核心技术的厂商将在整机定价权、产品迭代节奏上占据主动,而依赖外采的整机厂商将面临成本和供应链双重压力。
• 产业链国产化提速:据中国信通院数据,截至 2025 年 12 月,我国具身智能和机器人领域投资事件数达 744 起,融资总额 735.43 亿元人民币。随着政策持续加码(工信部《人形机器人创新发展指导意见》将人形机器人列为 "未来产业重点方向"),国产关节模组有望在 2027 年前实现中高端市场的规模化替代。
业内预测,到 2027 年,工业场景中人形机器人渗透率将突破 25%,服务机器人市场规模有望增长至 2000 亿元。这一预测的兑现,很大程度上依赖于关节模组这一核心瓶颈的持续突破。
六、挑战与风险:高速赛道的冷思考
当然,高速成长赛道从来都不是坦途。关节模组行业仍面临以下挑战:
• 技术可靠性验证周期长:关节模组在真实工况下需承受数百万次循环载荷,可靠性验证周期通常需要 1-2 年,快速量产与充分验证之间存在内在张力。
• 人才供给严重不足:同时精通机电一体化、控制算法、材料工程的复合型工程师极度稀缺,制约研发速度。
• 标准碎片化仍是难题:20 余种接口标准共存,增加了整机厂商的选型成本和供应链管理复杂度。
结语:关节模组迭代将给人形机器人更大的未来
人形机器人这场科技竞赛,表面上看是整机的比拼、算法的较量,但深层逻辑始终指向那个被称为 "关节模组" 的核心部件 —— 这个重量不足 5 公斤、售价或许数千元的模块,却撑起了整机超过一半的成本,也承载着机器人真正 "动起来" 的物理基础。
从旋转关节到直线关节,从准直驱到弹性仿生,技术路线百花齐放;国产供应链正在以全球罕见的速度集体崛起。2025-2027 年,将是人形机器人关节模组从 "技术验证" 走向 "规模量产" 的决定性窗口。
这不仅是一场零部件的战争,更是未来制造业格局的预演。
