人形机器人的关节应该怎么选? 线性 vs 旋转,工程师必须算清楚的那道题
Date:2026-05-11决定机器人命运的,是关节
当人们争相讨论大模型算法和具身智能演示视频时,一场更具决定性的硬件战争,正在每一台人形机器人的关节内部无声上演。
这场战争的主角,是关节模组——机器人的“肌肉”。
关节模组不是普通零件,它的战略价值正在被行业彻底重估。据 Markets and Markets 报告,全球人形机器人市场规模预计从 2025 年的 29.2 亿美元增长至 2030 年的 152.6 亿美元,复合年均增长率高达 39.2%。高盛将其 2035 年全球预测上调至 380 亿美元,摩根士丹利更预判该市场将在 2050 年触达万亿美元量级。特斯拉于 2026 年 1 月在弗里蒙特工厂正式启动 Optimus Gen 3 量产,当年实际量产目标约 5 万至 10 万台,远期规划产能上限达 100 万台/年。
在这个市场爆发背后,最核心的数据来自成本结构本身:线性关节模组占整机 BOM 成本约 29.6%,旋转关节模组占约 26.5%,二者合计超过 56%。(数据来源:AI Robots Eidos / Tesla & Morgan Stanley 整合数据,2026 年)
但问题随之而来:人形机器人上究竟应该采用哪种关节模组?线性的还是旋转的?两者到底差在哪里?又该怎么选?
本文将从工程角度系统回答这些问题——梳理两种方案的核心差异、分析膝关节极限工况与实际验证,并给出清晰的选型决策框架。无论您的项目是人形机器人、外骨骼还是协作机械臂,希望这份来自工程视角的分析都能提供有价值的参考。
一、两种关节,两种物理逻辑
人形机器人的关节,绝不能靠“把电机装进去”简单实现。每个关节对运动范围、扭矩、抗冲击能力的要求都不一样,选错方案,轻则性能不足,重则关节报废。理解线性关节模组与旋转关节模组的根本差异,需要从物理原理出发。
旋转关节模组:适合大范围运动的关节
旋转关节模组的典型构型是:无框力矩电机 + 谐波减速器(或行星减速器)+ 力矩传感器 + 驱动器 + 编码器。它可以直接安装于关节枢轴,输出旋转扭矩,驱动肢体摆动。
这类方案控制精细、运动流畅,天然适合髋关节、肩关节、腰部等需要大范围连续旋转的部位。例如,髋关节需要前后大幅摆腿,同时还要完成外展和内旋,旋转关节模组安装在枢轴处,也正是大量人形机器人本体在此处的结构选择。
但它有一个不可忽视的物理短板:怕剧烈冲击。
谐波减速器的核心部件是“柔轮”,本质上是一片厚度约 0.1~0.3 mm 的弹性钢杯,依靠周期性弯曲变形完成传动。当一台自重较大的机器人跳跃落地时,膝关节处谐波减速器承受的瞬时冲击载荷,可能达到额定扭矩的数倍甚至更高——而这些载荷将集中在少数几颗齿上,足以在毫秒内造成轮齿断裂。
线性关节模组:膝踝关节处的正确答案
线性关节模组将旋转运动转化为直线推拉力,核心传动部件包括行星滚柱丝杠、滚珠丝杠或梯形丝杠。这正是特斯拉 Optimus 腿部结构的思路——髋关节以下,膝关节和踝关节采用电动线性关节模组,核心传动件为行星滚柱丝杠。
行星滚柱丝杠的关键优势在于:将载荷分散到数十个螺纹接触点。以 Optimus 膝关节为例,同一冲击载荷由数十颗行星滚柱同步分担,单个接触点的接触力大幅降低,寿命与谐波减速器相比可提升数倍。
此外,线性关节模组平行安装于腿部结构件,轮廓纤薄,完美模拟了人类的“肌腱 杠杆”生物力学结构——就像股四头肌线性收缩,通过髌腱转化为膝关节旋转力矩一样。
二、从实验室到工厂:膝关节的极限工况与实际验证
定性分析之后,还必须用工程实践说话。膝关节是人形机器人受力最严苛的关节之一——每一步行走、每一次跳跃、每一秒站立的冲击,全部汇聚于此。如何让膝关节在真实工况中“扛得住”且“活得久”,是每一个机器人工程师必须回答的工程题。
膝关节到底有多“惨”?
先看典型工况:一台自重和负载均较大的全尺寸人形机器人,在深蹲或搬运重物时,单侧膝关节需要承受的持续扭矩可能超过数倍于自身重量的负荷;而在奔跑跳跃的落地瞬间,冲击载荷更是额定工况的数倍之多。
如果把这台机器人比作人,那就相当于一个成年人长时间蹲着搬重物,膝盖不仅要撑住全部体重,还要随时承受来自地面的强反弹冲击。在这种工况下,关节的传动部件实际上处于一种“慢性疲劳 + 急性冲击”的双重考验中。
这就是为什么膝关节的选型,从来不是“装上就行”这么简单。将关节模组直接安装在膝关节枢轴处,意味着每一次落地冲击都要硬扛全部能量。在持续高冲击工况下,部分旋转关节模组的实际使用寿命可能远低于实验室标称值。
行业内并非没有教训。部分早期人形机器人原型机在跑步和跳跃测试中,膝关节模组出现轮齿断裂的情况并不罕见。这不一定是产品本身的质量问题,很多时候是方案选型与真实工况的错配。
线性方案的实际优势:载荷分散带来成倍寿命提升
线性关节模组的工程逻辑截然不同。以行星滚柱丝杠为核心传动件,载荷被分配到数十个螺纹滚柱与主丝杠之间的接触面上。每一个接触点分担的应力,远低于谐波减速器上单颗齿承受的峰值应力。
这带来了两个关键的工程优势:
第一,冲击耐受性大幅提升。反转式行星滚柱丝杠在行星运动中,滚柱与主丝杠之间形成的是曲面接触而非点接触,接触面积是传统滚珠丝杠的 6~15 倍。同等冲击条件下,行星滚柱丝杠的典型额定寿命可达到 20,000 小时以上,在高负载冲击场景中的表现明显优于谐波减速器直接承载方案。
第二,维护窗口更宽裕。由于应力分散,线性关节模组的磨损更加均匀缓慢,在实际应用中可实现更长的免维护周期。对于工厂巡检、仓储物流、养老照护等商业部署场景而言,这直接意味着更低的运维成本和更高的设备可用性。
线性关节模组在膝关节工况下的综合表现——冲击耐受性、寿命、结构紧凑性——均优于旋转关节模组方案。
两种方案在膝关节工况下的本质对比
| 对比维度 | 旋转关节模组(枢轴直驱) | 线性关节模组(偏轴安装) |
| 冲击承载方式 | 集中于谐波减速器少数薄齿 | 分散至数十个滚柱接触点 |
| 接触面积 | 极小(点接触) | 大(曲面接触,是滚珠丝杠 6~15 倍) |
| 安装位置 | 枢轴处,冲击能量最大点 | 偏轴安装,受保护位置 |
| 腿部轮廓 | 关节处较臃肿 | 平行腿骨,纤薄紧凑 |
| 仿生拟合度 | 较低 | 高(模拟肌腱-杠杆机制) |
| 膝关节冲击工况表现 | 受瞬时冲击影响大,实际寿命明显缩短 | 载荷分散,寿命显著延长,免维护周期更长 |
三、选型决策:回归工程本质,不要凭直觉和预算
面对具体项目,机器人工程师在选型时,必须先把需求算清楚,回归到每个项目工程的本质,可参考以下维度进行量化评估。
第一步:明确关节工况
| 关节工况 | 倾向方案 |
| 需要连续旋转超过 180° | 旋转关节模组 |
| 位于腿部,需承受行走/奔跑冲击 | 线性关节模组 |
| 需要保持腿部纤薄外形 | 线性关节模组 |
| 需要精细多自由度操作(手/腕) | 旋转关节模组 |
| 需要精确力控与安全人机交互 | 带力控旋转关节模组 |
| 整机重量为关键约束 | 轻量化关节模组 |
第二步:量化评估不可跳过
无论选择哪种方案,都必须先明确关节所需的峰值扭矩/推力,再推算电机参数、减速比、热管理需求。冲击场景下,安全系数建议按 3~5 倍额定值设计。
第三步:全生命周期成本评估
不能只看采购单价,还需优先评估:
• 项目应用工况下性能的长期稳定可靠性
• 额定寿命下的维护更换频率
• 谐波减速器:典型寿命约 5,000~20,000 小时(视冲击载荷)
• 行星滚柱丝杠:典型寿命可达 20,000 小时以上(预负载设计)
• 厂商的研发实力与技术支持专业程度
• 备件可获得性与维修难度
无论用于人形机器人、外骨骼、假肢还是工业协作机械臂,决策流程都一样——先评估,再选型。
泰科机器人专为人形机器人研发的关节模组产品线
如果您正处于关节模组的选型评估阶段,需要能够提供稳定可靠的关节模组,泰科机器人的产品线覆盖了上述主要场景需求。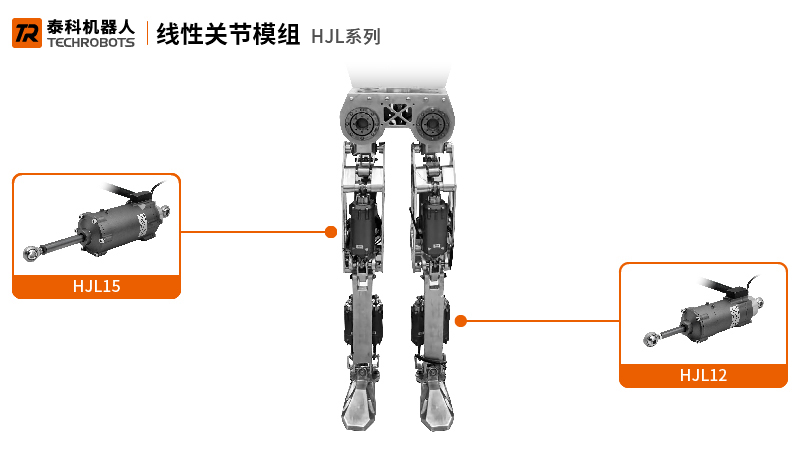
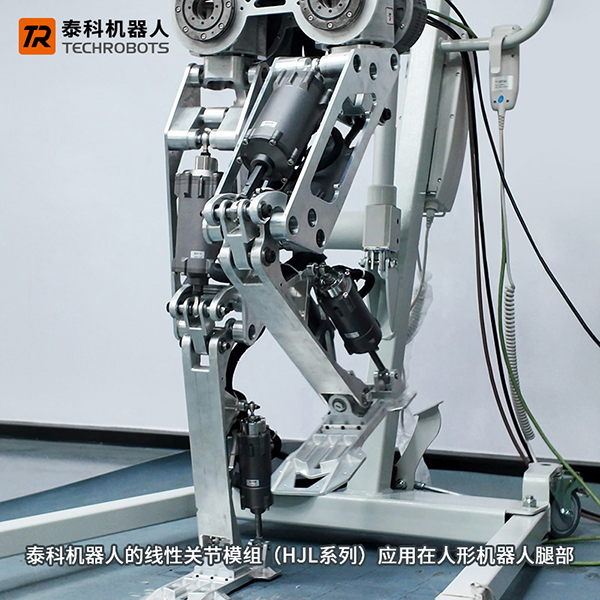
• 线性关节模组(HJL 系列):
针对腿部膝踝关节的高冲击、大推力工况设计,在紧凑封装内实现高推力密度与稳定输出能力。
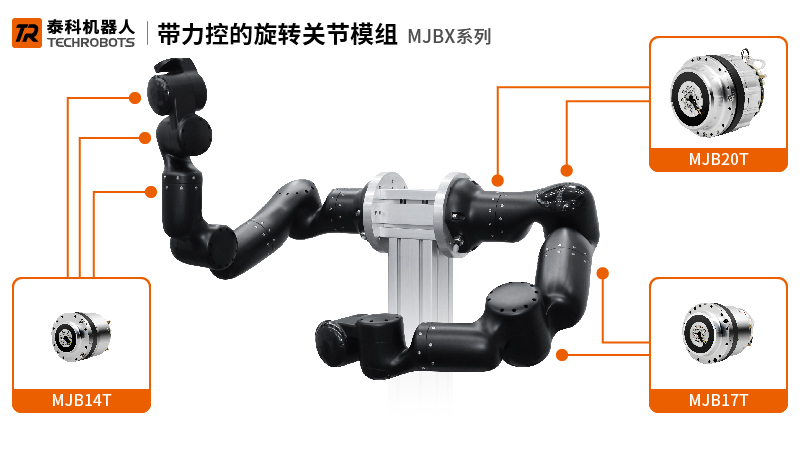
• 带力控的旋转关节模组(MJBX 系列):
面向骴关节、肩、肘、腕关节等需要大范围运动与力控协同的部位,集成力矩传感,适用于精细操作和人机安全交互场景。
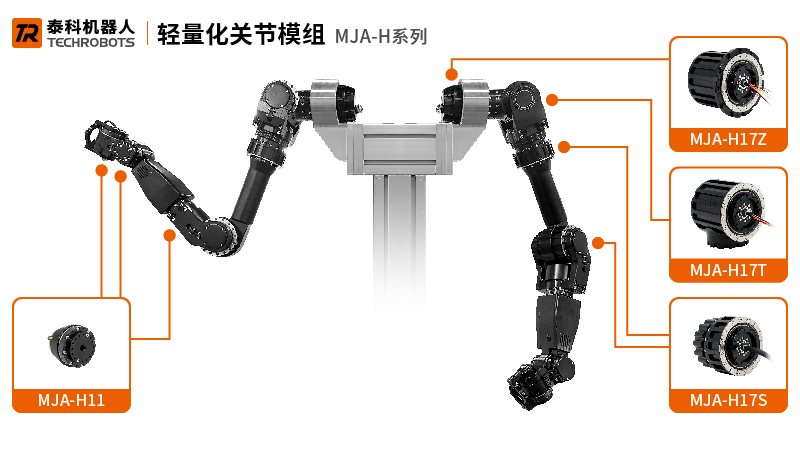
• 轻量化关节模组(MJA-H 系列):
在保证输出性能的前提下大幅压缩自重,直接支撑整机轻量化设计目标。
泰科机器人深耕高性能机器人核心零部件研发制造已有 18 年,技术积累从伺服驱动器、编码器起步,延伸至各类关节模组与机器人本体,具备从底层零部件到整机的完整技术栈,并可根据您的独特需求进行深度定制,助力您的机器人项目高效落地。
四、结语:不是谁替代谁,而是精准适配
线性关节模组与旋转关节模组之争的终局,没有绝对的优劣之分,也不会是某一种方案一统天下,只有是否匹配您的项目需求。
真正的竞争力,是谁在复杂工况下具有更高的可靠性。
物理定律已经给出了答案:腿部承冲击,用线性关节;上肢求自由度,用旋转关节;末端要精细,用特种执行器。真正有竞争力的人形机器人,都是这套混合架构的精准实践者。
工程选型没有捷径,只有一步:把你所需关节的工况评估清楚,然后做决定。而每一家认真对待人形机器人商业化的公司,都必须回答这道工程题:你的机器人关节,算过了吗?
