- 11.5kg自重最小至
- 20kg最大有效负载至
- ±0.05mm最小重复定位精度
- 1500mm臂展最大至
- 2000+交付量
-

TB6-R3
有效负载:3kg
工作半径:550mm
重复定位精度:±0.05mm -

TB6-R5
有效负载:5kg
工作半径:933mm
重复定位精度:±0.05mm -

TB6-R10
有效负载:10kg
工作半径:1333mm
重复定位精度:±0.08mm -

TB6-R15
有效负载:15kg
工作半径:1333mm
重复定位精度:±0.1mm -

TB6-R20L
有效负载:20kg
工作半径:1500mm
重复定位精度:±0.1mm
六轴协作机器人介绍视频
技术参数
| 产品特征 | |||||
| 型号 | TB6-R3 | TB6-R5 | TB6-R10 | TB6-R15 | TB6-R20L |
| 有效负载 | 3kg | 5kg | 10kg | 15kg | 20kg |
| 重复定位精度 | ±0.05mm | ±0.05mm | ±0.08mm | ±0.1mm | ±0.1mm |
| 自重 | 11.5kg | 25kg | 37kg | 37kg | 60kg |
| 工作半径 | 550mm | 933mm | 1333mm | 1333mm | 1500mm |
| 自由度 | 6 | 6 | 6 | 6 | 6 |
| 编程 | 在8寸触摸屏示教器的图形用户界面上进行 | ||||
| 协同操作 | 根据IOS10218-1:2011进行协同操作,具备“安全适用的受监控停止”“拖动示教”以及“功率与力限制”等协作机器人安全功能 | ||||
| 关节参数 | |||||
| 工作范围 | J1:±180° J2:±180° J3:±155° J4:±180° J5:±180° J6:±180° |
J1:±180° J2:±180° J3:±164° J4:±180° J5:±180° J6:±180° |
J1:±175° J2:±175° J3:±164° J4:±175° J5:±175° J6:±175° |
J1:±180° J2:±180° J3:±165° J4:±180° J5:±180° J6:±180° |
J1:±180° J2:±180° J3:±166° J4:±180° J5:±180° J6:±180° |
| 最大速度 | J1:180°/s J2:180°/s J3:180°/s J4:300°/s J5:300°/s J6:300°/s |
J1:150°/s J2:150°/s J3:150°/s J4:180°/s J5:180°/s J6:180°/s |
J1:100°/s J2:100°/s J3:130°/s J4:160°/s J5:160°/s J6:160°/s |
J1:100°/s J2:100°/s J3:100°/s J4:160°/s J5:160°/s J6:160°/s |
J1:90°/s J2:90°/s J3:100°/s J4:150°/s J5:150°/s J6:150°/s |
| 末端速度 | 2m/s | 2m/s | 3m/s | 2m/s | 1.6m/s |
| 抱闸类型 | 24/12VDC电磁摩擦式 | ||||
| 性能 | |||||
| 功耗 (普通工况下) | 150W | 300W | 500W | 500W | 960W |
| 额定寿命 | 30000h | ||||
| 环境温度 | -20~45℃ | ||||
| 环境湿度 | 25~85%(无冷凝) | ||||
| 防护等级 | IP64 | ||||
| 安装方式 | 任意角度 | ||||
| 噪音 | ≤60dB | ||||
| 通讯协议 | EtherCAT / CANopen | ||||
| 供电电源 | DC 48V | ||||
| 材质 | 铝合金 | ||||
| 底座尺寸 | □89×89mm | □110×110mm | □148×148mm | □148×148mm | □174×174mm |
| 工具I/O端口 | 2路数字输入,2路数字输出,2路模拟量输入 | ||||
| 工具I/O电源 | 24V | ||||
| 工具I/O电流输出 | 2A | ||||
| EtherCAT输出 | 1路 | ||||
注: 提供OEM/ODM定制化服务,如您有其它技术要求,请联系我们咨询。
| 产品特征 | ||
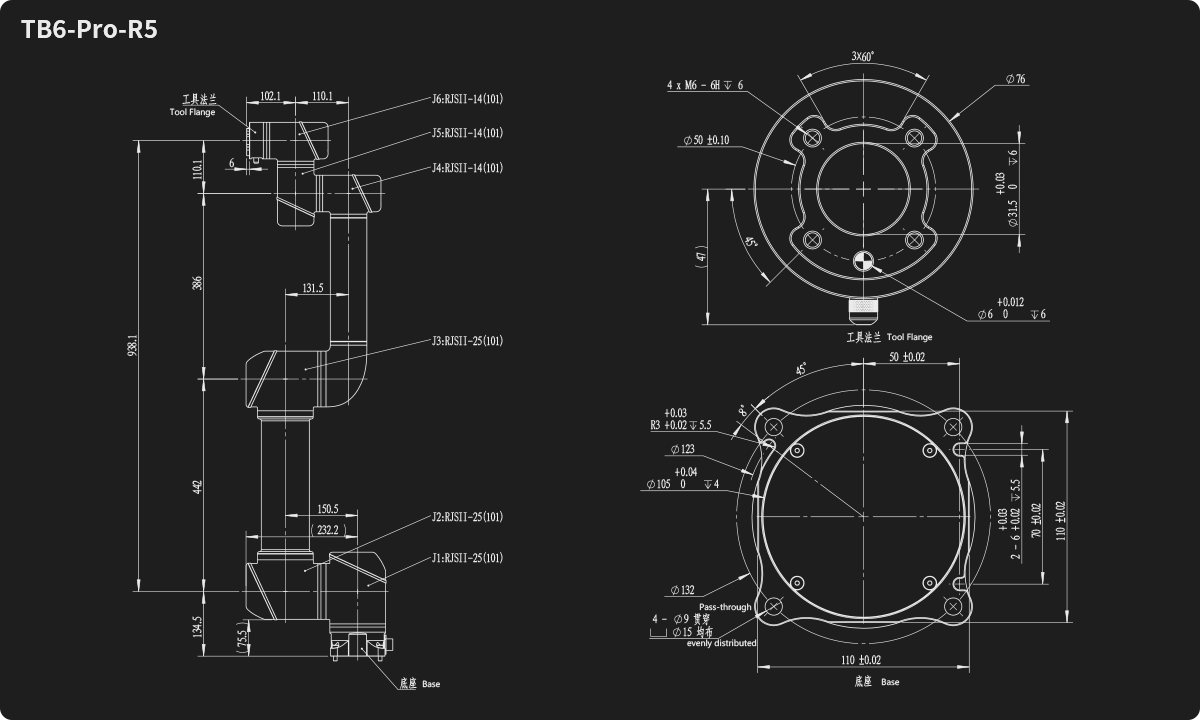
| 型号 | TB6-PRO-R3 | TB6-PRO-R5 |
| 有效负载 | 3kg | 5kg |
| 重复定位精度 | ±0.05mm | ±0.05mm |
| 自重 | 17kg | 25kg |
| 工作半径 | 666mm | 938.1mm |
| 自由度 | 6 | 6 |
| 编程 | 在8寸触摸屏示教器的图形用户界面上进行 | |
| 协同操作 | 根据IOS10218-1:2011进行协同操作,具备“安全适用的受监控停止”“拖动示教”以及“功率与力限制”等协作机器人安全功能 | |
| 关节参数 | ||
| 工作范围 | J1:±180° J2:±180° J3:±155° J4:±180° J5:±180° J6:±180° |
J1:±180° J2:±180° J3:±155° J4:±180° J5:±180° J6:±180° |
| 最大速度 | J1:180°/s J2:180°/s J3:180°/s J4:300°/s J5:300°/s J6:300°/s |
J1:180°/s J2:180°/s J3:180°/s J4:300°/s J5:300°/s J6:300°/s |
| 末端速度 | 2m/s | 2m/s |
| 抱闸类型 | 24/12VDC电磁摩擦式 | |
| 力传感器 | 单维力传感器 | 单维力传感器 |
| 性能 | ||
| 功耗 (普通工况下) | 150W | 300W |
| 额定寿命 | 30000h | |
| 环境温度 | -20~45℃ | |
| 环境湿度 | 25~85%(无冷凝) | |
| 防护等级 | IP64 | |
| 安装方式 | 任意角度 | |
| 噪音 | ≤60dB | |
| 通讯协议 | EtherCAT / CANopen | |
| 供电电源 | DC 48V | |
| 材质 | 铝合金 | |
| 底座尺寸 | □92×92mm | □110×110mm |
| 工具I/O端口 | 2路数字输入,2路数字输出,2路模拟量输入 | |
| 工具I/O电源 | 24V | |
| 工具I/O电流输出 | 2A | |
| EtherCAT输出 | 1路 | |
注: 提供OEM/ODM定制化服务,如您有其它技术要求,请联系我们咨询。






| 控制箱 | ||
| 尺寸 | 487×236×460mm | |
| 重量 | 10kg | |
| 连接线长度 | 6m | |
| 供电电源 | 100-240VAC 50-60Hz | |
| 防护等级 | IP54 | |
| 主控制器 | X86架构,Linux实时操作系统 | |
| 扩展通讯协议 | TCP/IP,Modbus TCP/RTU(RS485) | |
| 控制箱I/O接口 | ||
| 普通I/O | ||
| 数字量输入 | 24 | |
| 数字量输出 | 24 | |
| I/O电源 | 24V 5A | |
| 示教器 | ||
| 尺寸 | 280×199.1×70.7mm | |
| 重量 | 1.2kg | |
| 显示器 | 8寸电阻式彩色液晶TFT触控屏,800*600像素 | |
| 连接线长度 | 4.5m | |
| 防护等级 | IP65 | |
注: 提供OEM/ODM定制化服务,如您有其它技术要求,请联系我们咨询。