工业人形机器人手臂选型指南:混合构型、轻量化与全力控,三条技术路线怎么选?
Date:2026-06-02做工业级人形机器人本体开发,能真正“干活”的手臂选型往往是最早、也最关键的环节。推压装配、螺丝锁紧、精密零件抓取等不同作业场景,对应截然不同的手臂方案;自重与负载失衡、构型选型失误,会直接导致整机架构重构。
人形机器人手臂选型不能只看硬件参数,还要根据应用需求判断:耐冲击需求大选混合构型,整机减重选全旋转轻量臂,力控精度要求高选全力控臂。同时驱动接口开放的手臂,能对接你自己的控制器和开发框架,决定了产品长期迭代与系统集成的可行性。
2026年,中国人形机器人市场产量预计同比增长94%(TrendForce集邦咨询数据),应用场景拓展至当前的3倍以上。泰科机器人推出的混合构型、轻量化、全力控三款量产 7 轴工业人形机器人手臂,三条技术路线边界清晰,覆盖全场景工业需求。
• 混合构型臂:抗冲击能力最强(线性关节使用行星滚柱丝杠结构),适合长时间搬运、装配等大受力场景。
• 轻量化全旋转臂:自重仅5.6kg,负载自重比1:1.87,是小负载轮式人形机器人的首选。
• 全力控臂:每个关节配备力传感器和制动器,力控能力三款最强,适合精密协作。
三款手臂全系支持EtherCAT/CANopen (可选) 总线标准协议,关节内置自研伺服驱动器,客户可配接自己的控制器进行二次开发,也支持定制与自主集成。
一、三款7轴人形机器人手臂拆解:按场景精准选型
泰科机器人目前推出的三款人形机器人双臂均为量产产品,分别聚焦耐冲击大负载、极致轻量化、全关节全力控三大工业级应用场景核心需求。
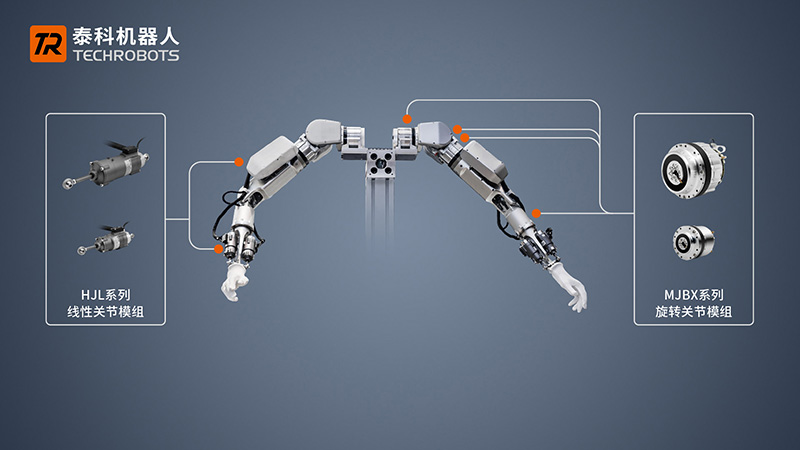
1. 5KG混合构型人形机器人手臂
这是三款手臂中运动空间最大、功能最复合的一款。单臂7个自由度中,4个使用MJBX旋转关节、3个使用HJL线性关节:旋转关节负责大角度转动,线性关节实现低功耗耐力输出。混合构型保证了运动空间的灵活性。
核心参数:
| 参数 | 数值 |
| 单臂自重 | 10kg |
| 有效负载 | ≥5kg |
| 臂展 | 642.4mm(三款中最长) |
| 力控 | 单关节单维力传感器,末端可选配六维力传感器+灵巧手 |
| 通信 | EtherCAT / CANopen |
适用场景:工业装配线上的长时间操作、科研机构的多模式运动实验、需要同时兼顾耐冲击和灵活旋转的复合场景。
关节配置:
• 1~3轴:MJB20T旋转关节。平均负载转矩80N·m,最大瞬时转矩182N·m,配备单维力传感器。
• 4轴:HJL12线性关节。最大推力4000N,行程72mm。
• 5轴:MJB14T旋转关节。平均负载转矩13.5N·m。
• 6~7轴:HJL08线性关节×2。最大推力600N,行程38mm。
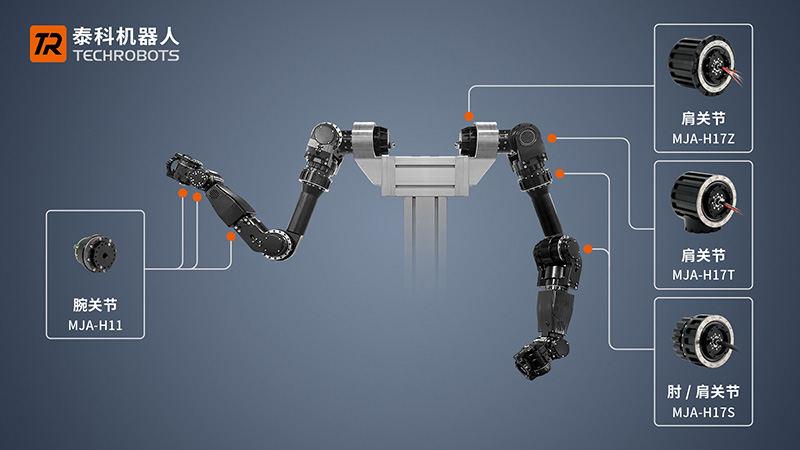
2. 3KG轻量化臂人形机器人手臂
这款手臂主打轻量化。单臂自重仅5.6kg,有效负载≤3kg,负载自重比约1:1.87。自2024年底至今持续量产,已获得众多客户高度认可。
核心参数:
| 参数 | 数值 |
| 单臂自重 | 5.6kg |
| 有效负载 | ≤3kg |
| 臂展 | 600mm |
| 力控 | 末端可选配六维力传感器+灵巧手 |
| 通信 | EtherCAT / CANopen |
适用场景:轮式人形机器人、科研实验平台、搭载在轮式或双足平台上的轻量工业操作臂。
关节配置(全部使用MJA-H系列轻量化关节):
• 1轴:MJA-H17Z(平均负载转矩48N·m,自重0.81kg)
• 2轴:MJA-H17T(平均负载转矩48N·m,自重0.81kg)
• 3~4轴:MJA-H17S×2(平均负载转矩25N·m,自重0.75kg×2)
• 5~7轴:MJA-H11×3(平均负载转矩6.2N·m,自重0.31kg×3)
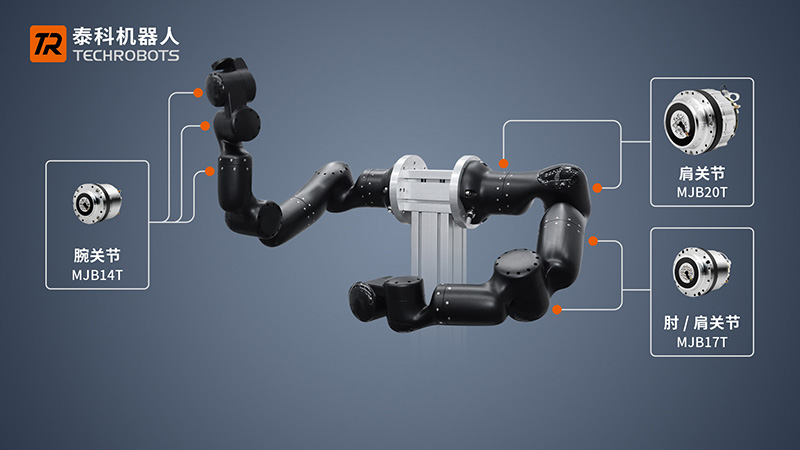
3. 5KG大负载全力控人形机器人手臂
三款中力控能力最强。单臂7个关节全部使用MJBX系列带力控旋转关节,每个关节可选配力传感器和制动器。
核心参数:
| 参数 | 数值 |
| 单臂自重 | 12kg |
| 有效负载 | ≥5kg |
| 臂展 | 600mm |
| 力控 | 单关节可选配单维力传感器,末端可选配六维力传感器+灵巧手 |
| 通信 | EtherCAT / CANopen |
12kg的自重是三款中最重的,但这换来了大负载和每个关节的力控能力——从肩部到腕部全链路力控闭环,这是精密协作的硬件基础。
适用场景:工业精密操作、人机协作装配、需要高安全等级的力控场景。
注:本款已应用于泰科机器人的工业级轮式人形机器人上。
关节配置:
• 1~2轴:MJB20T×2。肩部大关节,平均负载转矩80N·m,最大瞬时转矩182N·m。
• 3~4轴:MJB17T×2。肘部关节,平均负载转矩49N·m,最大瞬时转矩107N·m。
• 5~7轴:MJB14T×3。腕部和手指,平均负载转矩13.5N·m,最大瞬时转矩66N·m。
三款手臂对比总览
| 对比项 | 5KG混合构型臂 | 3KG轻量化臂 | 5KG全力控臂 |
| 构型 | HJL线性+MJBX旋转 | MJA-H全旋转 | MJBX全旋转力控 |
| 自由度 | 7 | 7 | 7 |
| 单臂自重 | 10kg | 5.6kg | 12kg |
| 有效负载 | 5kg | 3kg | 5kg |
| 臂展 | 642.4mm | 600mm | 600mm |
| 关节力传感器 |
线性关节标配拉压力传感器, 旋转关节标配扭矩传感器 |
无 | 各关节标配扭矩传感器 |
| 制动器 | 旋转关节标配 | 无 | 标配(可选) |
| 中空直径 | ≥7mm | 最大5mm | ≥7mm |
| 通信协议 | EtherCAT/CANopen | EtherCAT/CANopen | EtherCAT/CANopen |
| 核心优势 | 耐冲击、臂展长、运动空间大 | 极致轻量、高性价比 | 全关节实时高精度力感知、高动态力控 |
| 适用场景 | 工业操作、科研实验 | 轮式人形机器人、科研平台 | 精密操作 |
| 其它 | 三款手臂均可选配具身智能小脑控制系统,实现更高层级的运动规划与动态平衡能力,拥有完善的功能与接口,并提供SDK,支持二次开发。 | ||
二、通信接口与集成开发:选型的长期价值维度
三款人形机器人手臂的关节模组均内置自研伺服驱动器,全系支持EtherCAT/CANopen(可选)总线标准协议,兼容自研 / 第三方控制器,提供两种集成路径:
1. 标配控制器快速落地
选配泰科机器人推荐的控制器,直接进行运动规划和应用开发,缩短项目落地周期。适合不需要控制器研发能力的集成商和终端用户(也可以在此控制器上进行二次开发)。
2. 自研控制器深度开发
若已有控制器或工控机,可通过EtherCAT/CANopen总线直接连接手臂,在控制器层面基于ROS/ROS2或其他框架进行二次开发。适合有自研控制器的开发团队和高校科研团队——你可以在控制器上部署任何开发框架。
泰科机器人负责手臂本体的性能和驱动接口的稳定输出,控制器层面的架构选择和二次开发由客户主导。典型集成流程:采购/定制泰科机器人手臂 → 选配或自研控制器 → 通过总线对接 → 运动规划开发 →自有平台集成。
三、关节模组:手臂性能差异的核心根源
三款手臂的核心性能差异,本质是关节模组选型策略不同——同样是7轴,用什么关节、怎么搭配,决定了手臂的耐冲击上限、力控能力和整体重量。

混合构型臂的耐力来自线性关节。
HJL系列线性关节通过行星滚柱丝杠将旋转运动转化为直线推力:4轴的HJL12最大推力4000N,6~7轴的HJL08最大推力600N。线性关节的推力不随臂展变化而衰减(旋转关节靠力矩产生推力,力臂越长推力越小),这是混合构型臂在长时间冲击场景中不可替代的原因。。旋转轴则由MJBX系列承担,保证运动灵活性的同时提供关键轴的力控能力。

全力控臂的力控能力来自MJBX全覆盖。
MJBX系列力控旋转关节内部集成电机、减速器、驱动器、编码器、力传感器和制动器。7个关节全部使用MJBX系列,意味着从肩部到腕部每个自由度都能参与力控闭环。肩部MJB20T承担最大力矩(平均80N·m),肘部MJB17T次之,腕部MJB14T完成精细动作。MJBX系列的中空走线设计(≥7mm)也让线缆布线更安全便捷。

轻量化臂的轻来自MJA-H的极致取舍。
MJA-H系列专为轻量化设计:无制动器、外壳一体化。7个关节全部使用MJA-H,单臂自重仅5.6kg,有效负载≤3kg。对于轮式人形机器人上的轻量工业操作场景,极致轻量化的整臂重量对整机平衡和续航的贡献更直接。
三款手臂用三种不同的关节组合策略,分别把性能天花板集中在耐冲击、力控精度和轻量化三个维度。选手臂,本质上是在这三个维度间做取舍。
结语
工业人形机器人手臂选型,需明确四大核心问题:
• 手臂需要多大负载能力?
• 整机对自重有多敏感?
• 需要多高的力控精度?
• 打算怎样“驾驭”它?
除了硬件层面,接口的开放性关乎长期价值:一款采用标准通信协议、支持自选控制器、允许独立定制的人形机器人手臂,保障了产品长期迭代与系统兼容,成为可持续复用的工业基础设施。
选型时多想一步:三年后这款手臂还能不能对接你的新控制器?
上一篇: 无
