机器人关节模组为何选择双编码器设计?
Date:2024-09-05双编码器的作用
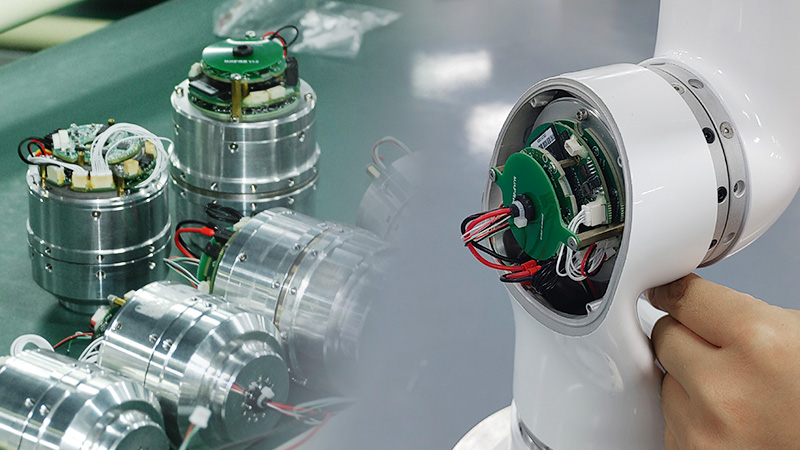
关节模组是机器人关节控制系统中的核心组件,决定了机器人的运动控制与动作精准度。在关节模组中,位置反馈和误差校正是确保精确运动的关键,而双编码器设计正是为此而设计的。
具体而言,双编码器由绝对值编码器和增量编码器组成。绝对值编码器负责提供精准的位置反馈,而增量编码器则负责实时误差校正。通过这两者的协同工作,能够显著提升关节模组的精度和可靠性,确保机器人在复杂任务中的准确表现。
双编码器设计的优势
1. 提升精度与稳定性:
双编码器系统结合了绝对值编码器的高精度位置反馈和增量编码器的误差校正功能,能确保机器人关节在运动中的每一步都准确无误。即使在动态复杂的环境下,机器人也能保持高度精确的动作控制。
2. 增强机器人的可靠性:
双编码器设计不仅提高了精度,还提升了机器人的可靠性。如果其中一个编码器发生故障,另一个编码器可以及时检测并进行校正,确保关节模组正常稳定的运行。
3. 提高抗干扰能力:
在复杂环境中,外界干扰可能影响机器人的稳定性。通过双编码器共同工作,能够有效减弱干扰对关节运动的影响,确保机器人能够稳定运行,保持高效性能。
综上所述,关节模组采用双编码器设计,核心目的是为了实现位置反馈和误差校正,从而提升机器人的精度、稳定性和抗干扰能力。双编码器的组合不仅让机器人在精密操作中表现更加出色,还为关节模组提供长期的可靠性保障。因此,双编码器设计已经成为先进机器人关节模组的标配,助力机器人在各种复杂应用场景中发挥最佳性能。
FAQ:
Q:人形机器人关节模组为什么需要双编码器?
A:单编码器存在掉电后位置丢失问题;双编码器方案中,绝对值编码器在断电后仍可保持位置记忆,增量编码器则在运行中提供高分辨率实时反馈,两者配合可同时满足开机零点精度和动态控制精度的双重需求。
上一篇: 协作机器人:重塑未来工作环境的新伙伴
下一篇: 协作机器人在零部件组装中的卓越效率表现
