六轴关节机器人的六个轴的作用是什么?
Date:2020-05-20
协作机器人主要是指三轴、四轴、五轴、六轴甚至七轴的协作机器人,每个机器人都因其使用方式和应用领域的不同而不同。那让我们来看看六轴机器人的六个轴都有什么作用?
一轴为基座:第一轴连接底座的部分,主要承载上面轴的重量和基座的左右旋转,左转和右转是通过关节内置的电机和减速器来传动的,每个轴代替一个运动方向,一轴的运动范围可以达到±360°。
二轴为肩部:二轴控制机器人主臂前后摆动和整个手臂上下运动的功能。
三轴为肘部:三轴也是控制机器人前后摆动的功能,但第三轴的摆动臂范围小于第二轴。
四轴为腕部:四轴是控制微调上下翻转动作,旋转的运动范围最大可达±180°。
五轴为腕部:五轴控制微调左右旋转动作,旋转的运动范围最大可达±180°。
六轴为腕部:六轴是末端关节部分,负责末端夹具工作,旋转的运动范围可达±360°。
以下是泰科六轴协作机器人各关节轴的图片和及应用实例。
泰科智能机器人专业研发生产高性能、高功率密度、智能型通用协作机器人关节模组及相关组件,帮助客户解决更具挑战性的运动控制问题与应用。

泰科智能六轴协作机器人六轴示意图
二轴为肩部:二轴控制机器人主臂前后摆动和整个手臂上下运动的功能。
三轴为肘部:三轴也是控制机器人前后摆动的功能,但第三轴的摆动臂范围小于第二轴。
四轴为腕部:四轴是控制微调上下翻转动作,旋转的运动范围最大可达±180°。
五轴为腕部:五轴控制微调左右旋转动作,旋转的运动范围最大可达±180°。
六轴为腕部:六轴是末端关节部分,负责末端夹具工作,旋转的运动范围可达±360°。
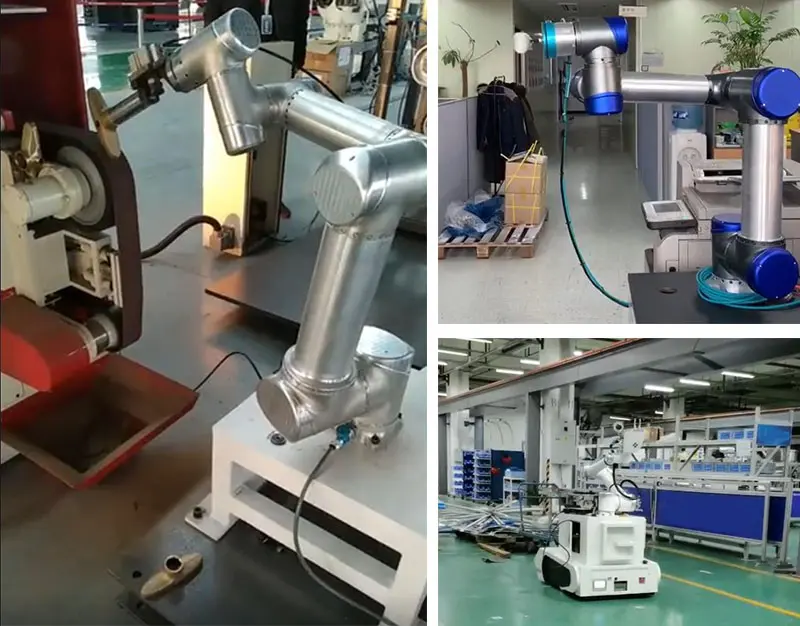
以下是泰科六轴协作机器人各关节轴的图片和及应用实例。
泰科智能机器人应用实际案例
泰科智能机器人专业研发生产高性能、高功率密度、智能型通用协作机器人关节模组及相关组件,帮助客户解决更具挑战性的运动控制问题与应用。
我们能为客户提供一个宽范围的产品:
(1)协作机器人:双臂协作机器人,TC7系列七轴协作机器人,TB6系列六轴协作机器人,TC6系列六轴协作机器人系列
(2)机器人关节模组研发包含产品:MJX系列、DJB系列、RJSII系列、 RJSIIZ系列、RJUZ系列等
(3)电机与驱动:关节电机、ADM微型驱动器、伺服驱动器、绝对值编码器、增量编码器、力传感器
(4)一站式OEM定制化产品和行业解决方案
上一篇: 新冠疫情影响之下,医疗机器人发展就此起飞
下一篇: 协作式机器人,为企业自动化生产助力
