机器人关节运动控制电机被减速器取代的原因分析
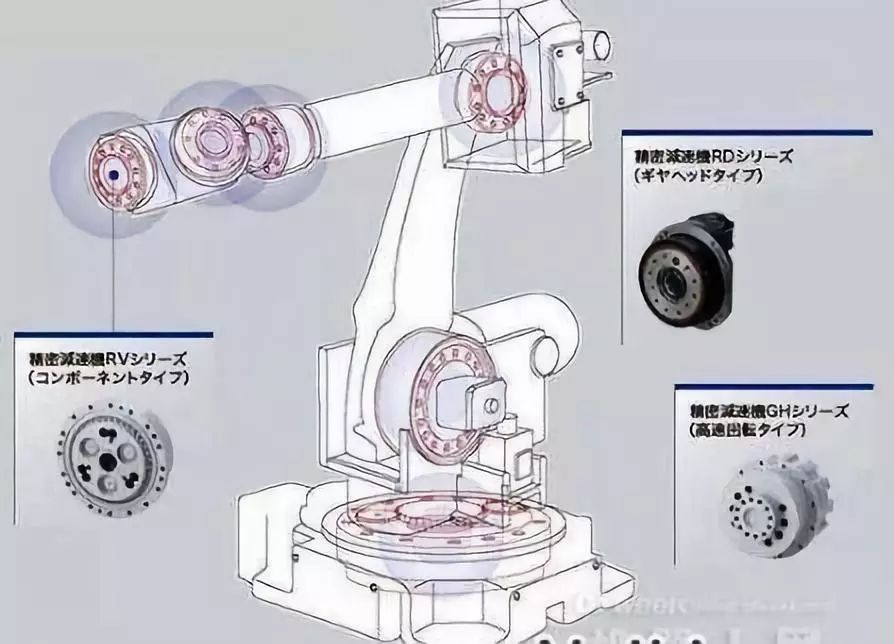
Date:2019-09-26从机器人臂部结构图中我们可以看到,在机器人关节处都安装有电机和减速机用来控制关节运动,那么问题来了:
在机器人系统中,为什么不能直接控制伺服电机转子转速控制关节运动,为何还需要减速器?
要回答这个问题,首先要明确工业机器人关节的工况:
1. 工业机器人的关节需要撑住后端机构由于重力产生的扭矩。
2. 工业机器人关节转速不高。机器人关节角速度很低,可电机在极低的速度下转动是不平稳的,控制不易,需要一个机械让电机在较合理的转速下运动,保证运动的平顺。
那么使用减速机的原因有两点,第一点是提扭矩,第二点就是提控制分辨率和闭环精度。
例如,一个50:1的谐波减速机就能轻松将一个额定100mNm的电机的额定扭矩提升到5Nm,代价是:
1.转子转速比直驱高49倍
本来工业机器人的关节转速就不高,一般都是每秒一两转,额定100mNm的电机轻松跑6k转/min,白不转那么快。要是嫌转的不够快?解决办法就是提电压,但这要考虑的是轴承和转子是否撑得住。
2.重量提高到原来3倍
举个例子,maxon EC45最厚的电机额定转矩为83mNm,重110g;maxon EC90的额定转矩为560mNm,重600g。从这个两个数据出发,可以脑补一下额定5Nm的电机重量是多少倍。
3.维持相同扭矩时,发热功率是不加减速机的1/2500
其实不是说额定100mNm的电机干不到5Nm,也是可以做到的,只要往死里提电流就好了,但这样将会造成电机快速发烫,撑不了几秒就得冒烟,就算上了水冷电费也会比较多。要想达到相同扭矩又不想太烫就得换扭矩/发热效率高且热阻小、热容量大的电机,但这样就又回到2所说的问题了。
此外,使用减速机的好处有:
1.以更低价格的机械实现更高的分辨率
一个普通5k线的光电码盘就能实现1.44mdeg的角度分辨率(当然,如果资金太多上正余弦编码器使劲细分也可以实现的);或者是一个5相1000步的步进电机可以做到7.2mdeg的分辨率(此处说的就是东方电机的33步进+50:1的谐波)。分辨率高的好处是转速控制可以更精确,由于量化造成的阶跃产生的高频分量变得很小,控制更加平滑。
2. 提高闭环精度,更好的控制控制环路
由于有个50:1的大减速比,减速机出轴受到扰动传递到电机端就比直驱缩减了37dB,使得闭环精度在减速机出轴显得更高。同时转子等效的转动惯量提高到了2500倍,使得控制环路的滞后环节受转子惯量占主导,而转子由于直接受电磁力的驱动从而没有由于刚度造成的扭矩滞后,比直驱要好控。
除了上面技术性方面的解答,这里还有一个案例,可来从另一个角度间接回答此问题。
某客户一种型号为6150的车床,卡盘为10寸(直径约250mm)液压卡盘,为了达到单边7mm的切削能力,利用主轴电机(交流异步电机)的低速大扭矩(转矩)特性,拟选取一款7.5kw额定转速1000转的电机,同时使用1:2传动比(减速)的齿轮。
已知传动比和功率、转矩成正比,即使用1:2的传动比,7.5kw的电机达到了15kw、同时2倍转矩(注意,此处不是指2倍额定转矩)的特性。如果选择的是15kw的电机,价格就要贵不少,安装尺寸也要变大;而加工出1:2传动比的一对齿轮不需要很多钱。
不明白的可查看下面这张异步电机功率、转矩特性曲线图。(注意:和直流电机不同,异步电机是可能工作在超过横转矩区的。)

除了获得低速、大扭矩特性,机器人上用的直流电机可能也有这方面原因,而所用的减速机的传动比可能更大(2级传动或更高)。

当然,使用减速机并不是完美的,还是有一些缺点,但是,两相比较之下,还是使用减速机更为合适。
使用减速机之缺点:
1. 如果配置了减速机而编码器又装在电机端的话,减速机的制造精度会影响实际精度;
2. 多级减速机里的齿隙油膜厚度变化等小误差经过多级放大还是会造成重复精度的下降;
3. 还有减速机毕竟有齿轮啮合或是柔轮变形,有寿命限制;
4. 对多连杆机构齿隙的非线性耦合使得机器人的绝对精度较差,所以工业机器人只谈重复定位精度不谈绝对精度,从而使得机器人很难纯粹地进行离线编程,提高了部署的难度和成本。
以上就是为什么不能直接控制伺服电机转子转速来控制关节运动,而是需要使用减速器的原因。虽然现在有直驱电机驱动的机器人,但是由于上述问题,成熟度上还差一些。
总之,工业机器人上用减速机就是用电机容易达到的高转速换取电机不易做到的高扭矩和低质量。
上一篇: 机器人实现控制的原理
