伺服驱动专家
关节模组先锋
六轴协作机器人
TB6系列
TC6系列
七轴协作机器人
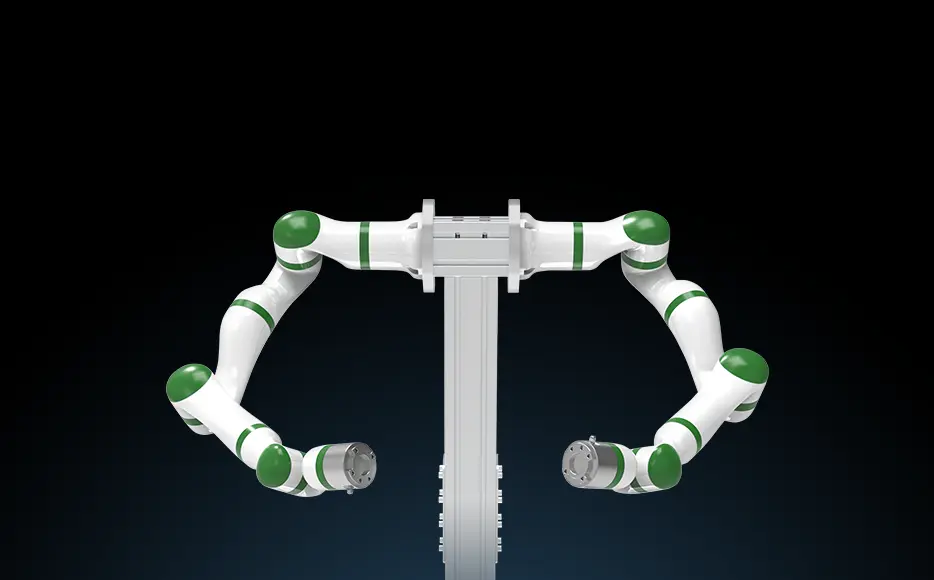
双臂协作机器人
人形机器人关节
HJL系列
MJBX系列
MJA-H系列
MJX系列
RJSII系列
RJSIIZ系列
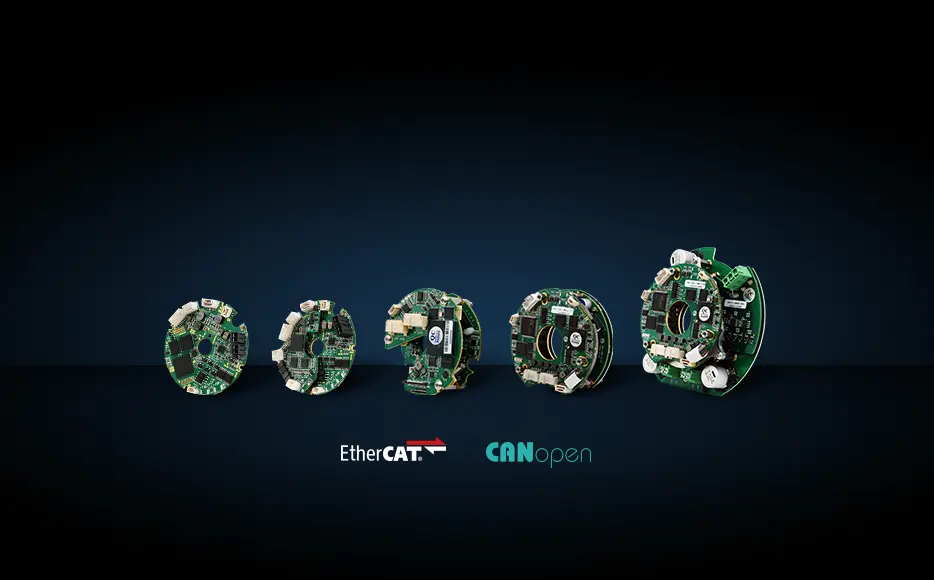
伺服驱动组件
协作机器人案例
关节模组案例
技术优势
资料下载
常见问题
定制化服务
公司简介
新闻中心
行星滚柱丝杠 | 性能强劲 | 稳定可靠
14个自由度 | 轻量化设计 | 比拟双手
精巧结构 | 让机器人开发更自由
高功率密度 | 精准控制 | 可靠性强
提供深度定制化服务,让机器人开发更简单
资料下载 常见问题 定制化服务
您可在此了解泰科机器人的最新资讯