
HJR Series Rotary Actuator with Force Control
New Products• Specifically developed for humanoid robot applications, customized services are provided.
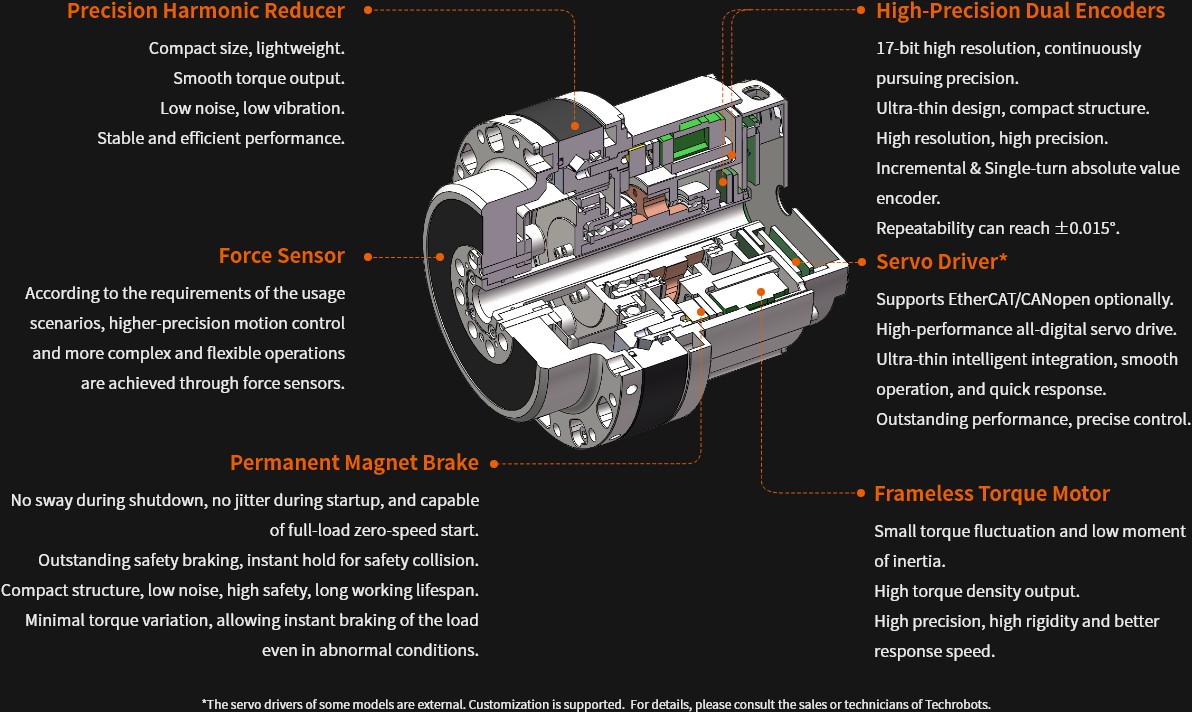
• Integrated harmonic reducer, motor, brake, encoder, driver and torque sensor.
• Innovative structure of the harmonic reducer further improves the overall lightweight level of the actuator.
• Powerful torque, strong performance, stable and reliable.
• Available in various specifications, assemble humanoid robots freely, significantly shortening the development cycle.
Application ScenariosSpecific Cases >
Widely applied to humanoid robots, bipedal robots, bionic robots with large loads, etc.
- 0.84kgMin Self-weight
- 70mmMin Diameter
- 133N·mMax Average Load Torque
- 80rpmMax Speed
- 60arcsecRepeatability

HJR14
Diameter: 70mm
Weight: 0.84kg
Average Load Torque: 13.5N·m
Rated Speed: 35rpm
Brake: Permanent Magnet Brake
Sensor: Single-Dimensional Force Sensor

HJR17
Diameter: 80mm
Weight: 1.2kg
Average Load Torque: 49N·m
Rated Speed: 29rpm
Brake: Permanent Magnet Brake
Sensor: Single-Dimensional Force Sensor

HJR20
Diameter: 90mm
Weight: 1.5kg
Average Load Torque: 80N·m
Rated Speed: 35rpm
Brake: Permanent Magnet Brake
Sensor: Single-Dimensional Force Sensor

HJR25
Diameter: 110mm
Weight: 2.3kg
Average Load Torque: 133N·m
Rated Speed: 24.5rpm
Brake: Permanent Magnet Brake
Sensor: Single-Dimensional Force Sensor
New craftsmanship with unique ingenuity
Solve the adaptability and stability of robots in more complex working environments
Technical Specifications
Specification
| Items | Unit | HJR14 | HJR17 | HJR20 | HJR25 |
| Parameters of Harmonic Drive Reducer | |||||
| Reduction Ratio | -- | 100 | 120 | 120 | 120 |
| Gearbox Backlash | arcsec | ≤20 | ≤20 | ≤20 | ≤20 |
| Transmission Accuracy | arcmin | <1 | <1 | <1 | <1 |
| Average Lifespan | Hour | 20000 | 20000 | 20000 | 20000 |
| Output Capability | |||||
| Permissible Starting and Stopping Torque | N·m | 34 | 66 | 108 | 207 |
| Average Load Torque | N·m | 13.5 | 49 | 80 | 133 |
| Maximum Instantaneous Torque | N·m | 66 | 107 | 182 | 376 |
| Maximum Allowable Bending Torque | N·m | 80 | 140 | 230 | 420 |
| Rated Speed | rpm | 35 | 29 | 35 | 24.5 |
| Maximum Speed | rpm | 80 | 58 | 50 | 29.1 |
| Repeatability | arcsec | <60 | <60 | <60 | <60 |
| Absolute Positioning Accuracy | arcsec | <300 | <300 | <300 | <300 |
| Servo System | |||||
| Motor Power | W | 100 | 180 | 250 | 500 |
| Rated Voltage | VDC | 48 | 48 | 48 | 48 |
| Rated Current | A(rms) | 3.8 | 5 | 8 | 10.5 |
| Peak Current | A(rms) | 11.6 | 14.5 | 15 | 25.8 |
| Incremental Encoder | P/R | 8000 | 8000 | 8000 | 8000 |
| Absolute Encoder | Bit | 17 | 17 | 17 | 17 |
| Communication Protocol | -- | EtherCAT / CANopen | |||
| Dimensions | |||||
| Diameter | mm | 70 | 80 | 90 | 110 |
| Length | mm | 88 | 99.3 | 92.8 | 107.6 |
| Through Hole Diameter | mm | 7 | 7 | 7 | 9.8 |
| Weight | kg | 0.84 | 1.2 | 1.5 | 2.3 |
| Other Specification | |||||
| Sensor | Single - Dimensional Force Sensor | ||||
| Brake | Permanent Magnet Brake | ||||
| IP Degree | IP40 | ||||
| Operating Environment | Operating Temperature: 0~40°C (Optional: -40 to 60°C), Storage Temperature: -40~ 80°C, Ambient Humidity: 90% Relative Humidity (Non-condensing) |
||||
Note: We offer OEM/ODM customization services. If you have any additional technical requirements, please contact us for further consultation.
Rapidly Assemble Humanoid Robots
Assisting in saving time and labor costs during the processes of robot design, accessory selection, performance testing, etc.
