
RJSII Series Actuator
Bestseller• Second-gen cobot Actuator, available in various specifications, for quick assembly of your robot.
• Classic style, powerful performance, high reliability.
• Brand-new structural design, excellent heat dissipation performance.
• Operating temperature range of -20°C to 50°C, suitable for harsh weather conditions.
• Powerful output, maximum torque options ranging from 50 to 1500N·m.
• IP54 protection level (IP65 optional), suitable for demanding working environments.
• Provide customized services for products and solutions.
Application ScenariosSpecific Cases >
Collaborative Robots, Medical Robots, Precision Turntables, Automation Equipment, etc
- 1.04kgSelf-Weight
- 66mmMinimum Diameter
- 557N·mMaximum Average Load Torque
- <60arcsecRepeatability
- 8000+Shipping Volume

RJSII-14S
Diameter: 66mm
Weight: 1.04kg
Average load torque: 10.5N·m
Rated speed: 30rpm

RJSII-14
Diameter: 76mm
Weight: 1.6kg
Average load torque: 13.5N·m
Rated speed: 30rpm

RJSII-17
Diameter: 90mm
Weight: 2.6kg
Average load torque: 49N·m
Rated speed: 19.8rpm

RJSII-25
Diameter: 116mm
Weight: 4.5kg
Average load torque: 133N·m
Rated speed: 24.8rpm
RJSII-32
Diameter: 152mm
Weight: 8.6kg
Average load torque: 267N·m
Rated speed: 12.4rpm
RJSII-40
Diameter: 184mm
Weight: 15kg
Average load torque: 557N·m
Rated speed: 16.5rpm
Upgraded with Premium Craftsmanship, High Cost-Effectiveness
Significant performance boost, higher accuracy, increased torque, and smoother, safer operation
Technical Specifications
Specifications
Drawings
| Category | Unit | RJSII-14S | RJSII-14 | RJSII-17 | RJSII-20 | RJSII-25 | RJSII-32 | RJSII-40 |
| Parameters of Harmonic Drive Reducer | ||||||||
| Reduction Ratio | -- | 100 | 101 | 101 | 101 | 101/121 | 121 | 121 |
| Gearbox Backlash | arcsec | <10 | <10 | <10 | <10 | <10 | <10 | <10 |
| Transmission Accuracy | arcmin | <1 | <1 | <1 | <1 | <1 | <1 | <1 |
| Average Lifespan | Hour | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 |
| Output Capability | ||||||||
| Permissible Starting and Stopping Torque | N·m | 26 | 34 | 66 | 102 | 194/207 | 459 | 800 |
| Average Load Torque | N·m | 10.5 | 13.5 | 49 | 61 | 133 | 267 | 557 |
| Maximum Instantaneous Torque | N·m | 51 | 66 | 134 | 182 | 351/376 | 848 | 1458 |
| Maximum Allowable Bending Torque | N·m | 20 | 41 | 72 | 140 | 243 | 460 | 600 |
| Rated Speed | rpm | 30 | 30 | 19.8 | 26.7 | 29.7/24.8 | 12.4 | 16.5 |
| Maximum Speed | rpm | 55 | 45 | 28.7 | 39.6 | 37.6/31.4 | 15.5 | 20 |
| Repeatability | arcsec | <60 | <60 | <60 | <60 | <60 | <60 | <60 |
| Absolute Positioning Accuracy | arcsec | <200 | <200 | <200 | <200 | <200 | <200 | <200 |
| Servo System | ||||||||
| Motor Power | W | 65 | 129 | 148 | 282 | 400 | 800 | 1450 |
| Rated Voltage | VDC | 48 | 48 | 48 | 48 | 48 | 48 | 48 |
| Rated Current | A(rms) | 3.6 | 4.8 | 5.7 | 9.5 | 11.5 | 19.6 | 33.7 |
| Peak Current | A(rms) | 10.8 | 14.4 | 17.1 | 27.25 | 28.75 | 40 | 67.4 |
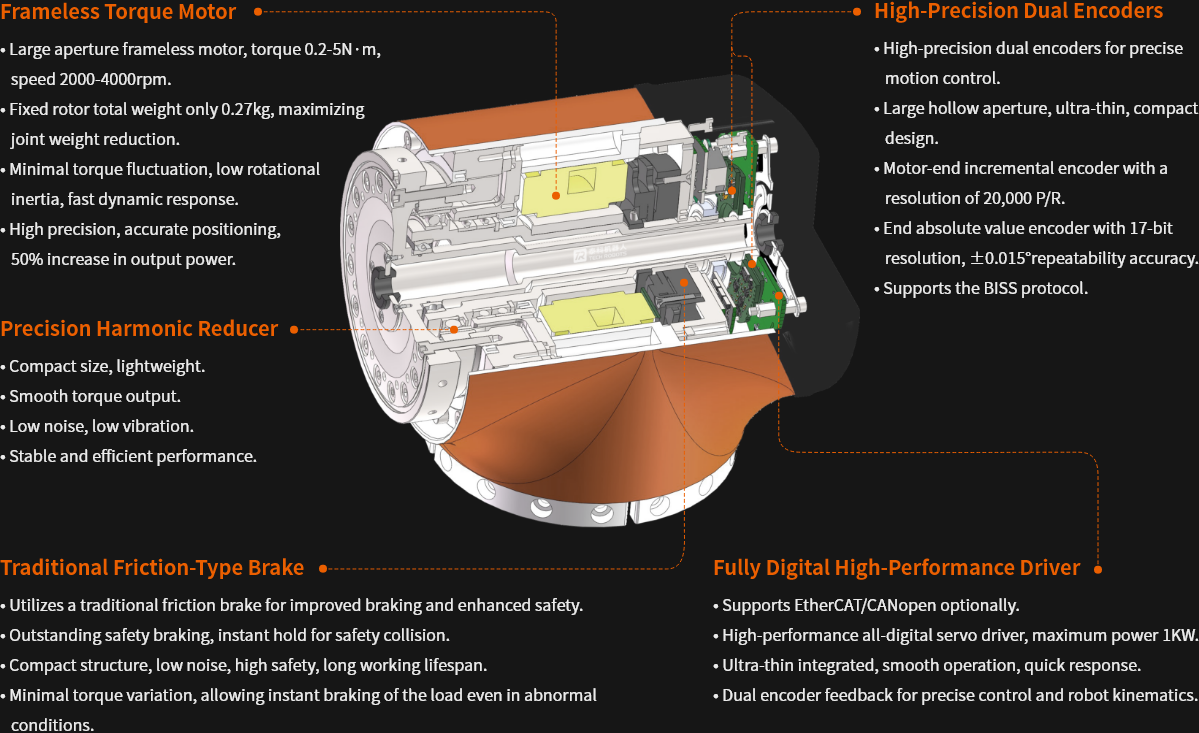
| Incremental Encoder | P/R | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 |
| Absolute Encoder | Bit | 17 | 17 | 17 | 17 | 17 | 17 | 17 |
| Communication Protocol | -- | EtherCAT / CANopen | ||||||
| Dimensions | ||||||||
| Diameter | mm | 66 | 76 | 90 | 96 | 116 | 152 | 184 |
| Length | mm | 114 | 122 | 139 | 131 | 149 | 181 | 209 |
| Through Hole Diameter | mm | 6.5 | 7.5 | 12 | 12 | 12 | 14 | 15 |
| Weight | kg | 1.04 | 1.6 | 2.6 | 3.1 | 4.5 | 8.6 | 15 |
| Other Specification | ||||||||
| Brake | 24/12VDC Electromagnetic Friction Type | |||||||
| IP Degree | IP54(IP65 optional) | |||||||
| Operating Environment | Operating Temperature: 0 to 50°C (Optional: -40 to 60°C), Storage Temperature: -40 to 80°C, Ambient Humidity: 90% Relative Humidity (Non-condensing) |
|||||||
Note: We offer OEM/ODM customization services. If you have any additional technical requirements, please contact us for further consultation.








RJSII Series Actuator Model Description
| RJSII | -14 | -100 | -20 | B2 | -SA17 | -D6 | E | -B1 |
| Series | Model | Gear Ratio | Stator Length | Brake | Absolute Value Encoder | Drive Model | Default Communication Config. | Version Number |
| Straight Cylindrical Joint | 14S | 100-1:101 | 10 | B2:Electromagnetic Friction - Traditional Brake | S:Single Turn M:Multi-Turn A:Absolute Value 17:Encoder Single-Turn Resolution |
D1: RDM
D3: RDM2
D4: RTM08
D5: MJA14-RGT
D6: RGT
D10: MJA14-RDM
|
E: EtherCAT
C:CANopen
R: 485
|
B1:Design Version Number |
| 14 | 20 | |||||||
| 17 | 120-1:121 | 25.2 | ||||||
| 20 | 15.3 | |||||||
| 25 | 27 | |||||||
| 32 | 160-1:161 | 31 | ||||||
| 40 | 25 |
ExampleModel:
Assemble the robot quickly
Assisting in streamlining robot design, accessory selection, and performance testing to save time and manpower costs

