What problems should we pay attention to when selecting a robot?
Date:2019-08-14When choosing a robot, customers should not only pay attention to the load, but also to the maximum workspace at the end of the robot, that is, the arm span and the maximum pick-up height of the reachable position at the end of the robot. Arm span refers to the maximum working diameter of the end of the parallel robot on the horizontal plane. The distance from the farthest point of the robot P to the center point of the robot base on the horizontal plane is half of the maximum working radius, that is, the arm span. The maximum pickup height, i. e. the maximum vertical motion range, refers to the range between the lowest point (usually lower than the robot's moving platform) and the highest point that the robot P can reach.
But in practical application, different robots and different application scenarios affect the choice of robot arm exhibition. Especially in the selection of robots, the following technical points should be paid special attention to:
1. The reachable workspace at the end of the robot can be divided into full workspace and effective workspace.
Taking a parallel robot as an example, the whole workspace is a set of reachable points at the end of the robot when all positions and postures are given. It can be obtained by the method of arc intersection. Its shape is a three-dimensional umbrella-like space and its icon is W.

The premise of the definition of effective workspace is the limit condition of the robot driving mechanism, which is a given safety limit angle by eliminating the singular attitude of the end of the robot and the interference of the entity parts. Therefore, the effective workspace is the maximum effective workspace that can be reached at the end of the robot in the range of safe limit angle. In order to visualize the effective workspace, the figure of the effective workspace is simplified to a cylindrical space (icon D) composed of a cylinder and an inverted cylindrical table.

Considering the practical application of customers, the effective workspace figure D defined in this paper is mainly composed of one cylinder and two inverted tables (as shown in the figure above), and the inverted tables shown in D3 are similar to the inverted cone. In the effective workspace D, the rigidity of the end of the robot decreases gradually from the center point of the base to the farthest point in the horizontal direction and from the center point to the lowest point in the vertical direction. Different structures of actual parts of robots lead to different degrees of rigidity reduction.
2. Pick-up span in practical application should be at least less than 20CM arm span.
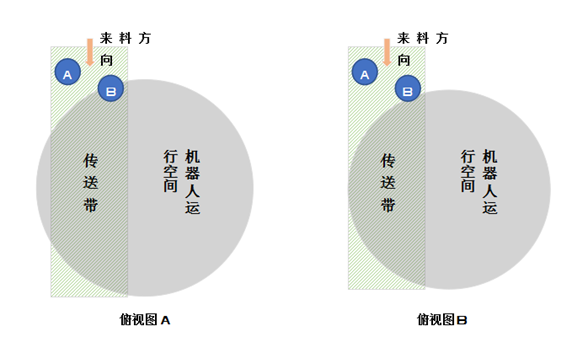
Every company will give the range of motion of the robot, but if the robot is put into the actual integrated solution, the load, pickup span, pickup and playback rhythm, the running speed of the conveyor belt and other related factors are important factors affecting the selection of arm exhibition.
As an example, the overlapping parts of robot workspace and conveyor belt workspace constitute the effective pickup space of the integration scheme. Because of the different locations of A and B objects on the conveyor belt, when passing through the conveyor belt, the time to stay in the effective pickup space is different. When the selection of the robot body arm is small, the time to stay in the effective pickup space is different. The transmission belt pickup is prone to blind spots, and a larger arm span also means a larger effective pickup space.
3. Parallel connection has the advantage of occupying more space and large arm span.
Compared with other industrial robots, end-freedom and workspace are not the areas that parallel robots are good at; moreover, larger arm span will inevitably restrict the moving speed, and the production efficiency can not be substantially improved; Ultra-large arm span practical scenarios are mostly for handling heavy objects, and the limit range of operation, high speed, and high load are the key factors. Structural stability requirements are extremely high, and these difficulties have been changed with the advent of D-2600 in January 2019. The 2600 mm super arm is the first in the field of parallel robots.
The ontology belongs to the customized product series of 3+1 axes. It was originally officially launched in November, 18 to meet the need of reducing the area occupied by customers. It took two months to complete the final in-house test phase. Besides the 2600 mm arm exhibition, the highest pick-up height reached 890 mm, and the standard beat (25-305-25 door trajectory) was 120. Repeated positioning accuracy (+0.1mm) per minute will be put into test on site.
In the case of arm expansion, as far as possible to ensure good performance of speed and load, the Bokent Institute of Robotics has made new breakthroughs in mechanical structure. In addition to inheriting the original structural advantages of the three plus one axis of Bokent, inspired by the tenon-mortise structure of traditional Chinese architecture, Robot Research Institute boldly tried to build a composite fixed platform with high rigidity characteristics. The structure greatly improved the stability of the arm extension structure in operation and avoided rigidity errors under high load and high speed operation. Problem; Reducer motor integrated design, light weight, small volume, high rotation accuracy, large torque; Fourth axis matching modular rotary unit, for large load and high precision applications to provide effective solutions, the workpiece can be accurately placed without the need to design secondary positioning device.
Previous Article: Five Trends of Industrial Robots in the Future
Next Article: Micro-robots usher in new opportunities in 2019
